|
Gromacs
2020.1
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Groups Pages
|
Gromacs
2020.1
|
A new modular approach to the GROMACS simulator is described. The simulator in GROMACS is the object which carries out a simulation. The simulator object is created and owned by the runner object, which is outside of the scope of this new approach, and will hence not be further described. The simulator object provides access to some generally used data, most of which is owned by the runner object.
GROMACS will automatically use the modular simulator for the velocity verlet integrator (integrator = md-vv), if the functionality chosen in the other input parameters is implemented in the new framework. Currently, this includes NVE simulations, NVT simulations ( tcoupl = v-rescale only), NPH simulation (pcoupl = parrinello-rahman only), and NPT simulations (tcoupl = v-rescale and pcoupl = parrinello-rahman only), with or without free energy perturbation.
To disable the modular simulator for cases defaulting to the new framework, the environment variable GMX_DISABLE_MODULAR_SIMULATOR=ON can be set. To use the new framework also for integrator = md (where the functionality is implemented), the environment variable GMX_USE_MODULAR_SIMULATOR=ON can be set to override legacy default.
In the legacy implementation, the simulator consisted of a number of independent functions carrying out different type of simulations, such as do_md (MD simulations), do_cg and do_steep (minimization), do_rerun (force and energy evaluation of simulation trajectories), do_mimic (MiMiC QM/MM simulations), do_nm (normal mode analysis), and do_tpi (test-particle insertion).
The legacy approach has some obvious drawbacks:
do_* functions defines local data, including complex objects encapsulating some data and functionality, but also data structures effectively used as "global variables" for communication between different parts of the simulation. Neither the ownership nor the access rights (except for const qualifiers) are clearly defined.do_* functions are dependent on each others, i.e. rely on being called in a specific order, but these dependencies are not clearly defined.do_* functions are hard to understand due to branching. At setup time, and then at every step of the simulation run, a number of booleans are set (e.g. bNS (do neighbor searching), bCalcEner (calculate energies), do_ene (write energies), bEner (energy calculation needed), etc). These booleans enable or disable branches of the code (for the current step or the entire run), mostly encoded as if(...) statements in the main do_* loop, but also in functions called from there.The main design goals of the new, fully modular simulator approach include
The general design approach is that of a task scheduler. Tasks are argument-less functions which perform a part of the computation. Periodically during the simulation, the scheduler builds a queue of tasks, i.e. a list of tasks which is then run through in order. Over time, with data dependencies clearly defined, this approach can be modified to have independent tasks run in parallel.
The approach is most easily displayed using some pseudo code:
class ModularSimulator : public ISimulator
{
public:
//! Run the simulator
void run() override;
private:
std::vector<ISignaller*> signallers_;
std::vector<ISimulatorElement*> elements_;
std::queue<SimulatorRunFunction*> taskQueue_;
}
void ModularSimulator::run()
{
constructElementsAndSignallers();
setupAllElements();
while (not lastStep)
{
// Fill the task queue with new tasks (can be precomputed for many steps)
populateTaskQueue();
// Now simply loop through the queue and run one task after the next
for (auto task : taskQueue)
{
(*task)(); // run task
}
}
}
This allows for an important division of tasks.
constructElementsAndSignallers() is responsible to store the elements in the right order. This includes the different order of element in different algorithms (e.g. leap-frog vs. velocity verlet), but also logical dependencies (energy output after compute globals).populateTaskQueue() is responsible to decide if elements need to run at a specific time step. The elements get called in order, and decide whether they need to run at a specific step. This can be pre-computed for multiple steps. In the current implementation, the tasks are pre-computed for the entire life-time of the neighbor list.The task scheduler holds a list of simulator elements, defined by the ISimulatorElement interface. These elements have a scheduleTask(Step, Time) function, which gets called by the task scheduler. This allows the simulator element to register one (or more) function pointers to be run at that specific (Step, Time). From the point of view of the element, it is important to note that the computation will not be carried out immediately, but that it will be called later during the actual (partial) simulation run. From the point of view of the builder of the task scheduler, it is important to note that the order of the elements determines the order in which computation is performed. The task scheduler periodically loops over its list of elements, builds a queue of function pointers to run, and returns this list of tasks. As an example, a possible application would be to build a new queue after each domain-decomposition (DD) / neighbor-searching (NS) step, which might occur every 100 steps. The scheduler would loop repeatedly over all its elements, with elements like the trajectory-writing element registering for only one or no step at all, the energy-calculation element registering for every tenth step, and the force, position / velocity propagation, and constraining algorithms registering for every step. The result would be a (long) queue of function pointers including all computations needed until the next DD / NS step, which can be run without any branching.
Some elements might require computations by other elements. If for example, the trajectory writing is an element independent from the energy-calculation element, it needs to signal to the energy element that it is about to write a trajectory, and that the energy element should be ready for that (i.e. perform an energy calculation in the upcoming step). This requirement, which replaces the boolean branching in the current implementation, is fulfilled by a Signaller - Client model. Classes implementing the ISignaller interface get called before every loop of the element list, and can inform registered clients about things happening during that step. The trajectory element, for example, can tell the energy element that it will write to trajectory at the end of this step. The energy element can then register an energy calculation during that step, being ready to write to trajectory when requested.
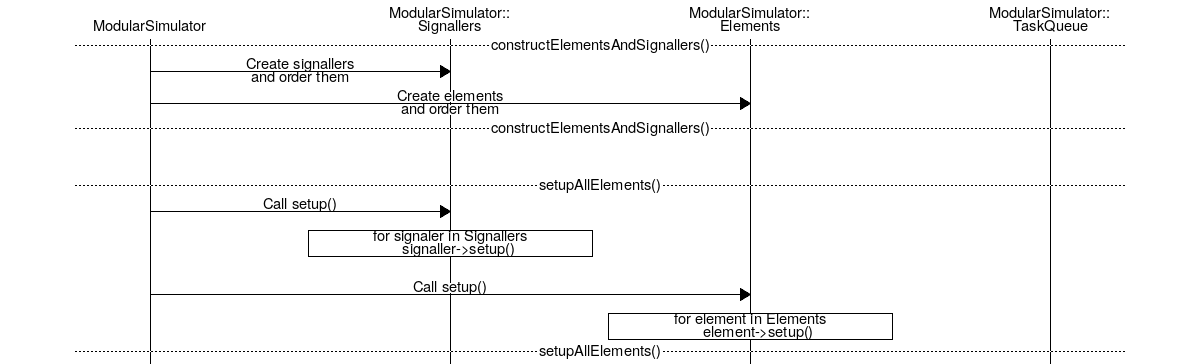
In the loop preparation, the signallers and elements are created and stored in the right order. The signallers and elements can then perform any setup operations needed.
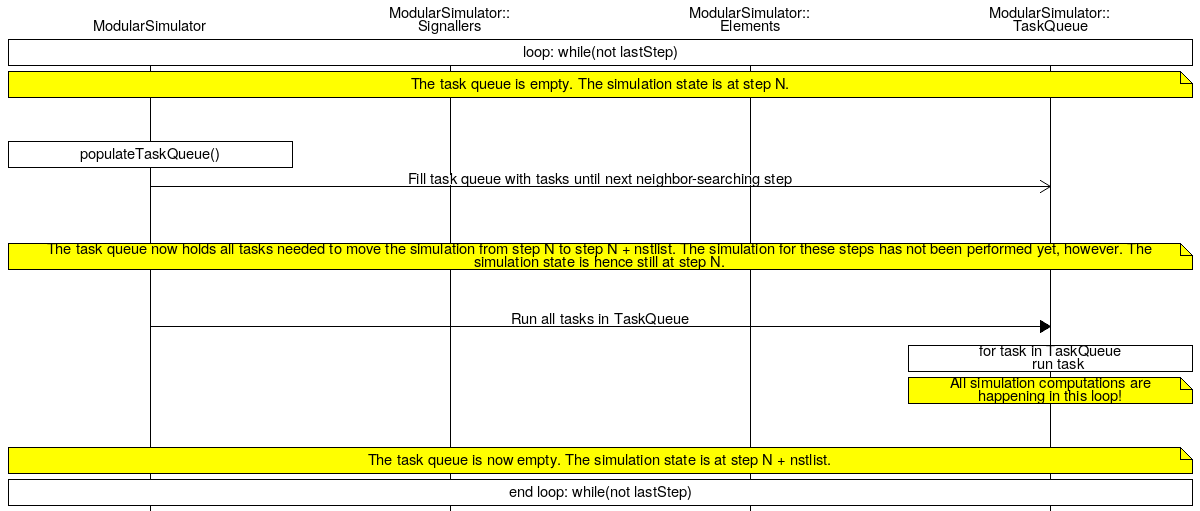
The main loop consists of two parts which are alternately run until the simulation stop criterion is met. The first part is the population of the task queue, which determines all tasks that will have to run to simulate the system for a given time period. In the current implementation, the scheduling period is set equal to the lifetime of the neighborlist. Once the tasks have been predetermined, the simulator runs them in order. This is the actual simulation computation, which can now run without any branching.
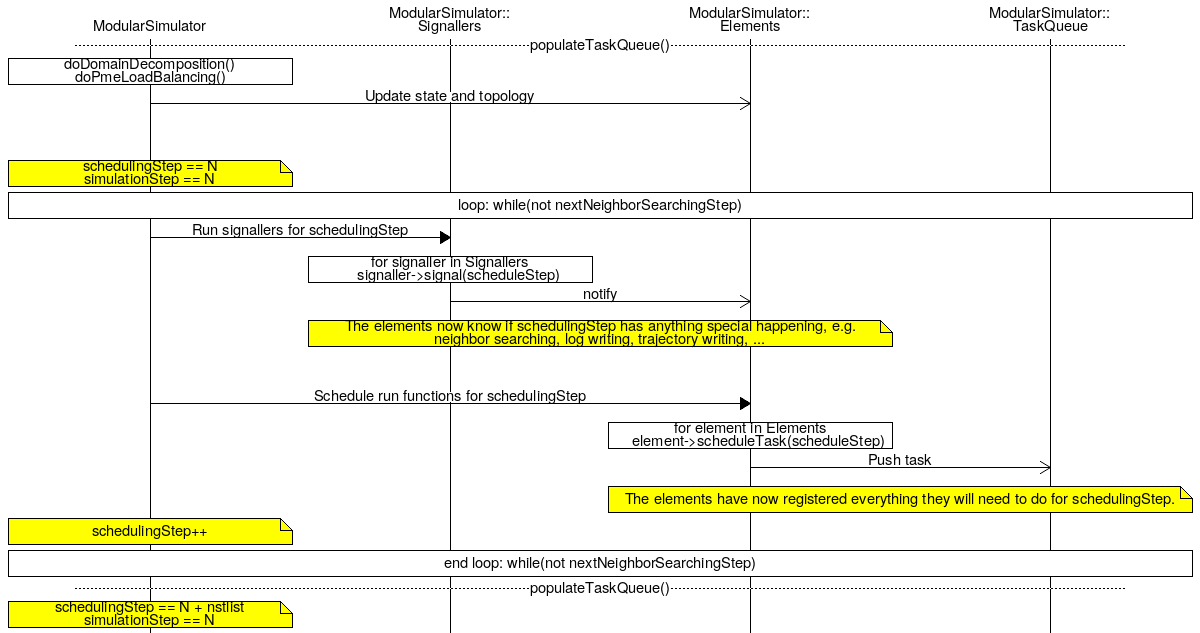
A part of the main loop, the task scheduling in populateTaskQueue() allows the elements to push tasks to the task queue. For every scheduling step, the signallers are run first to give the elements information about the upcoming scheduling step. The scheduling routine elements are then called in order, allowing the elements to register their respective tasks.
In January 2019, we defined acceptance tests which need to be fulfilled to make the modular simulator the default code path:
do_md and the new loop in Jenkins pre- and post-submit matricesAfter the MD bare minimum, we will want to add support for
Using the new modular simulator framework, we will then explore adding new functionality to GROMACS, including
We will also explore optimization opportunities, including
We will probably not prioritize support for (and might consider deprecating from do_md for GROMACS 2020)
The current implementation of the modular simulator consists of the following signallers and elements:
All signallers have a list of pointers to clients, objects that implement a respective interface and get notified of events the signaller is communicating.
NeighborSearchSignaller: Informs its clients whether the current step is a neighbor-searching step.LastStepSignaller: Informs its clients when the current step is the last step of the simulation.LoggingSignaller: Informs its clients whether output to the log file is written in the current step.EnergySignaller: Informs its clients about energy related special steps, namely energy calculation steps, virial calculation steps, and free energy calculation steps.TrajectoryElement: Informs its clients if writing to trajectory (state [x/v/f] and/or energy) is planned for the current step. Note that the TrajectoryElement is not a pure signaller, but also implements the ISimulatorElement interface (see section "Simulator Elements" below).TrajectoryElementThe TrajectoryElement is a special element, as it is both implementing the ISimulatorElement and the ISignaller interfaces. During the signaller phase, it is signalling its signaller clients that the trajectory will be written at the end of the current step. During the simulator run phase, it is calling its trajectory clients (which do not necessarily need to be identical with the signaller clients), passing them a valid output pointer and letting them write to trajectory. Unlike the legacy implementation, the trajectory element itself knows nothing about the data that is written to file - it is only responsible to inform clients about trajectory steps, and providing a valid file pointer to the objects that need to write to trajectory.
StatePropagatorDataThe StatePropagatorData takes part in the simulator run, as it might have to save a valid state at the right moment during the integration. Placing the StatePropagatorData correctly is for now the duty of the simulator builder - this might be automated later if we have enough meta-data of the variables (i.e., if StatePropagatorData knows at which time the variables currently are, and can decide when a valid state (full-time step of all variables) is reached. The StatePropagatorData is also a client of both the trajectory signaller and writer - it will save a state for later writeout during the simulator step if it knows that trajectory writing will occur later in the step, and it knows how to write to file given a file pointer by the TrajectoryElement.
EnergyElementThe EnergyElement takes part in the simulator run, as it does either add data (at energy calculation steps), or record a non-calculation step (all other steps). It is the responsibility of the simulator builder to ensure that the EnergyElement is called at a point of the simulator run at which it has access to a valid energy state.
ComputeGlobalsElementThe ComputeGlobalsElement encapsulates the legacy calls to compute_globals. While a new approach to the global reduction operations has been discussed, it is currently not part of this effort. This element therefore aims at offering an interface to the legacy implementation which is compatible with the new simulator approach.
The element currently comes in 3 (templated) flavors: the leap-frog case, the first call during a velocity-verlet integrator, and the second call during a velocity-verlet integrator. It is the responsibility of the simulator builder to place them at the right place of the integration algorithm.
ForceElement and ShellFCElementThe ForceElement and the ShellFCElement encapsulate the legacy calls to do_force and do_shellfc, respectively. It is the responsibility of the simulator builder to place them at the right place of the integration algorithm. Moving forward, a version of these elements which would allow to only calculate forces of subsets of degrees of freedom would be desirable to pave the way towards multiple time step integrators, allowing to integrate slower degrees of freedom at a different frequency than faster degrees of freedom.
ConstraintElementThe constraint element is implemented for the two cases of constraining both positions and velocities, and only velocities. It does not change the constraint implementation itself, but replaces the legacy constrain_coordinates and constrain_velocities calls from update.h by elements implementing the ISimulatorElement interface and using the new data management.
PropagatorThe propagator element can, through templating, cover the different propagation types used in the currently implemented MD schemes. The combination of templating, static functions, and having only the inner-most operations in the static functions allows to have performance comparable to fused update elements while keeping easily re-orderable single instructions.
Currently, the (templated) implementation covers four cases:
The propagators also allow to implement temperature and pressure coupling schemes by offering (templated) scaling of the velocities.
CompositeSimulatorElementThe composite simulator element takes a list of elements and implements the ISimulatorElement interface, making a group of elements effectively behave as one. This simplifies building algorithms.
VRescaleThermostatThe VRescaleThermostat implements the v-rescale thermostat. It takes a callback to the propagator and updates the velocity scaling factor according to the v-rescale thermostat formalism.
ParrinelloRahmanBarostatThe ParrinelloRahmanBarostat implements the Parrinello-Rahman barostat. It integrates the Parrinello-Rahman box velocity equations, takes a callback to the propagator to update the velocity scaling factor, and scales the box and the positions of the system.
FreeEnergyPerturbationElementThe FreeEnergyPerturbationElement holds the lambda vector and the current FEP state, offering access to its values via getter functions. The FreeEnergyPerturbationElement does update the lambda values during the simulation run if lambda is non-static. It implements the checkpointing client interface to save its current state for restart.
StatePropagatorDataThe StatePropagatorData contains a little more than the pure statistical-physical micro state, namely the positions, velocities, forces, and box matrix, as well as a backup of the positions and box of the last time step. While it takes part in the simulator loop to be able to backup positions / boxes and save the current state if needed, it's main purpose is to offer access to its data via getter methods. All elements reading or writing to this data need a pointer to the StatePropagatorData and need to request their data explicitly. This will later simplify the understanding of data dependencies between elements.
Note that the StatePropagatorData can be converted to and from the legacy t_state object. This is useful when dealing with functionality which has not yet been adapted to use the new data approach - of the elements currently implemented, only domain decomposition, PME load balancing, and the initial constraining are using this.
EnergyElementThe EnergyElement owns the EnergyObject, and is hence responsible for saving energy data and writing it to trajectory. It also owns the tensors for the different virials and the pressure as well as the total dipole vector.
It subscribes to the trajectory signaller, the energy signaller, and the logging signaller to know when an energy calculation is needed and when a non-recording step is enough. The simulator builder is responsible to place the element in a location at which a valid energy state is available. The EnergyElement is also a subscriber to the trajectory writer element, as it is responsible to write energy data to trajectory.
The EnergyElement offers an interface to add virial contributions, but also allows access to the raw pointers to tensor data, the dipole vector, and the legacy energy data structures.
TopologyHolderThe topology object owns the local topology and holds a constant reference to the global topology owned by the ISimulator.
The local topology is only infrequently changed if domain decomposition is on, and never otherwise. The topology holder therefore offers elements to register as ITopologyHolderClients. If they do so, they get a handle to the updated local topology whenever it is changed, and can rely that their handle is valid until the next update. The domain decomposition element is defined as friend class to be able to update the local topology when needed.
The topology holder is not a ISimulatorElement, i.e. it does not take part in the simulator loop.
DomDecHelper and PmeLoadBalanceHelperThese infrastructure elements are responsible for domain decomposition and PME load balancing, respectively. They encapsulate function calls which are important for performance, but outside the scope of this effort. They rely on legacy data structures for the state (both) and the topology (domdec).
The elements do not implement the ISimulatorElement interface, as the Simulator is calling them explicitly between task queue population steps. This allows elements to receive the new topology / state before deciding what functionality they need to run.
CheckpointingThe CheckpointHelper is responsible to write checkpoints. In the longer term, it will also be responsible to read checkpoints, but this is not yet implemented.
Writing checkpoints is done just before neighbor-searching (NS) steps, or before the last step. Checkpointing occurs periodically (by default, every 15 minutes), and needs two NS steps to take effect - on the first NS step, the checkpoint helper on master rank signals to all other ranks that checkpointing is about to occur. At the next NS step, the checkpoint is written. On the last step, checkpointing happens immediately before the step (no signalling). To be able to react to last step being signalled, the CheckpointHelper does also implement the ISimulatorElement interface, but does only register a function if the last step has been called.
Checkpointing happens at the top of a simulation step, which gives a straightforward re-entry point at the top of the simulator loop.
In the current implementation, the clients of CheckpointHelper fill a legacy t_state object (passed via pointer) with whatever data they need to store. The CheckpointHelper then writes the t_state object to file. This is an intermediate state of the code, as the long-term plan is for modules to read and write from a checkpoint file directly, without the need for a central object. The current implementation allows, however, to define clearly which modules take part in checkpointing, while using the current infrastructure for reading and writing to checkpoint.
 1.8.5
1.8.5